3ds max 5. Библия пользователя
построение связей модели манипулятора
Упражнение: построение связей модели манипулятора
Чтобы наглядно ознакомиться с возможностями системы обратной кинематики, создадим модель манипулятора, состоящего из шести распорок. К одному концу связи присоединим модель резинового паука на веревке. (Эта штука может весьма позабавить ваших сотрудников.)
Итак, чтобы создать систему обратной кинематики для манипулятора, выполните следующее.
- В папке Chapter Example Files на прилагаемом компакт-диске найдите файл Chap 33.zip, распакуйте его и откройте файл Extensible arm with spider.max. В файле находятся модель паука на конце нити и несколько распорок. Опорные точки объектов уже перемещены. Модель паука разработана компанией Zygote Media.
- Щелкните на кнопке Select and Link (Выделить и связать) основной панели инструментов. Свяжите паука с нитью. Для этого выделите паука и переместите курсор от паука к цилиндру. Паук станет дочерним объектом по отношению к цилиндру. Свяжите цилиндр с последней распоркой и повторите эту операцию со всеми распорками вплоть до первой.
- После установки связи нужно определить ограничения точек соединения системы. Для этого щелкните на кнопке IK вкладки Hierarchy. Выделите первую распорку (Rectangle01) и в разворачивающейся панели Object Parameters установите флажки Terminator. Bind Position (Позиция связи) и Bind Orientation (Ориентация связи). Эти установки запрещают движение первой распорки в любом направлении. В разворачивающихся панелях Sliding Joints и Rotational Joints снимите флажки Active для всех осей, кроме оси Z панели Rotational. Затем последовательно щелкните на обеих кнопках Сору разворачивающейся панели Object Parameters. После этого по очереди выделите остальные распорки и щелкните на обеих кнопках Paste. Это приведет к переносу параметров ограничений с первой распорки на остальные. Выделив объект цилиндра, установите флажок Active во всех разделах разворачивающейся панели Rotational Joints.
- Для проверки правильности настройки системы щелкните на кнопке Interactive IK разворачивающейся панели Inverse Kinematics и немного переместите модель паука. Перемещение паука приведет в движение все распорки.
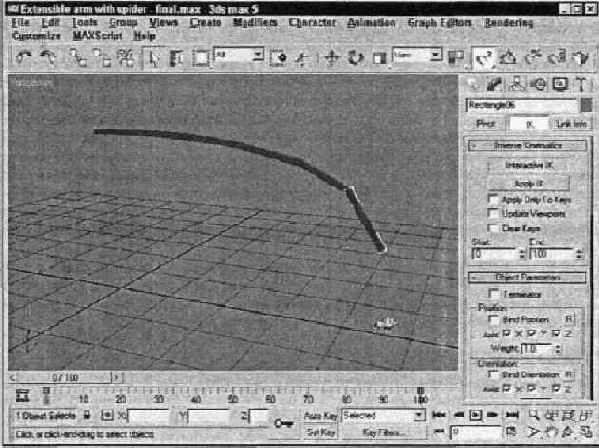
Связанная система, двигающаяся при переносе паука вниз, представлена на рис. 33.2. Обратите внимание на то, что первая распорка не перемещается и не вращается вместе с системой. Остальные распорки поворачиваются лишь вдоль оси Z, в то время как перемещение паука ограничено только нитью. Если отключить режим интерактивной обратной кинематики (Interactive IK), вы сможете перемещать и вращать объект, используя при этом только созданные связи.